多旋翼无人机飞行原理(无人机构成及其原理详解)
1)动力系统
目前大型、小型、轻型无人机广泛采用的动力装置为活塞式发动机系统。而出于成本和使用方便的考虑,微型无人机中普遍使用的是电动动力系统。
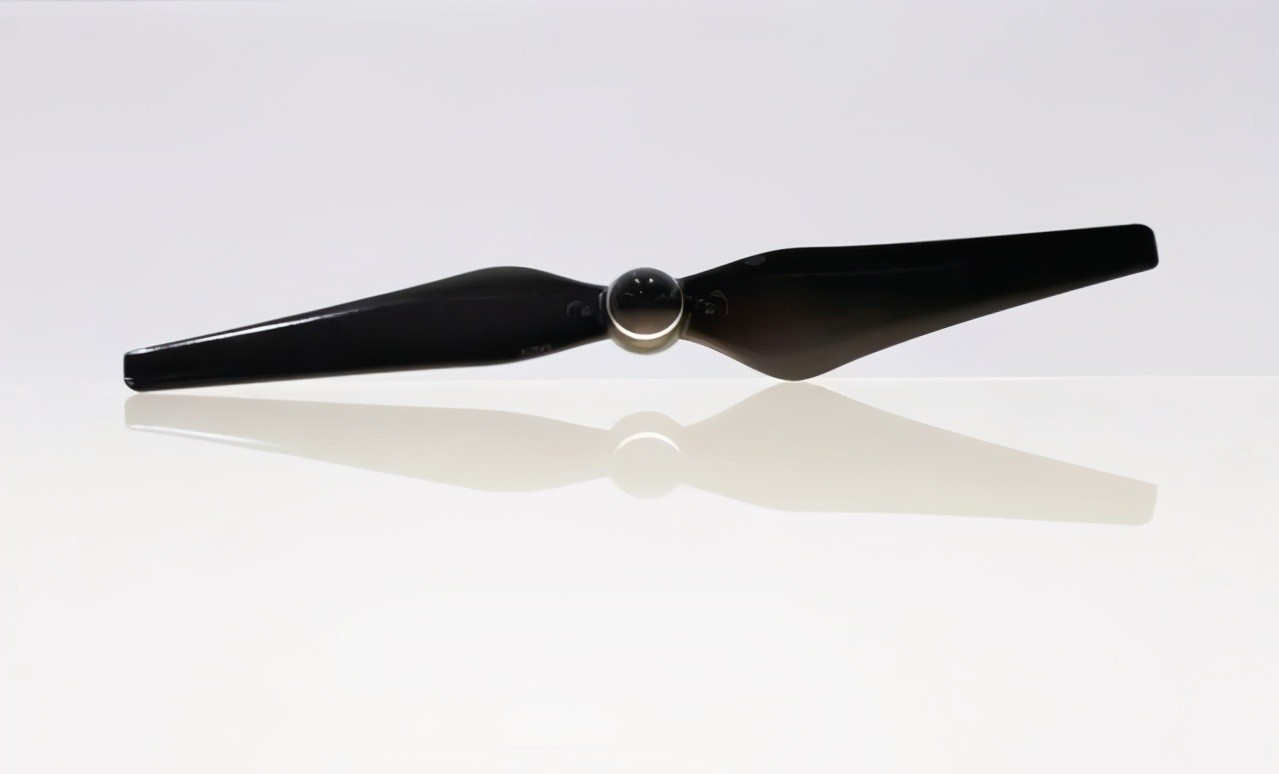
1. 螺旋桨:无人机产生推力的主要部件,常见的多旋翼无人机一般搭配4个螺旋桨,两个顺时针旋转,两个逆时针旋转。
关于正反桨:
正桨:俯视逆时针旋转(CCW)
反桨:俯视顺时针旋转(CW)
这是螺旋桨型号的具体分辨的方法,一般每一种电机都有它适配的螺旋桨,对于一种电机来说螺旋桨过大或过小都不太好,多轴飞行器的操纵主要就是依靠改变电机的转速,使每个螺旋桨产生不同的升力来进行操纵。
2. 电机:俗称马达,能将电能转化为机械能,带动螺旋桨旋转,从而产生推力。在微型无人机当中使用的动力电机可以分为两类:有刷电动机和无刷电动机。其中有刷电动机由于效率较低,在无人机领域已逐渐不再使用。有刷电机和无刷电机在外观上的主要区别就是:有刷电机是里面的电刷在转动被称为转子,外面不转的永磁体被称为定子,无刷电机是里面的电刷不转被称为定子,外面的永磁体转动被称为转子。当然还有一个最主要的区别就是无刷电机需要用交流电来驱动所以外面需要接上一个电子调速器而有刷电机直流电就可以将其驱动。
无刷电机型号的含义:电动机的型号主要以尺寸为依据。比如,有刷370电机,是指它不包括轴的长度是37mm;无刷外转子2208电机是指它定子线圈的直径是22mm,不包括轴电子线圈的高度是8mm。当然有一些型号是说它相当于某级别的,还有一些是厂家自己命名的。电动机的技术指标很多,与无人机动力特性最相关的两个是转速和功率。转速一般用kV来表示,所谓kV是指每伏特(V)能达到的空载每分钟转速。比如,使用kV1000的电机,11. 1V电池,电机转速应该是1000×11. 1=11100.即每分钟11100转。即每增加1V电机空载转速增加1000转。

3. 电子调速器:不仅可以调节电机转速,也可以为遥控接收器上其他通道的舵机供电,还能将电池提供的直流电转换为可直接驱动电机的三相交流电。
动力电机的调速系统称为电调,全称为电子调速器,英文为Electronic SpedCotoller,简称ESC 。针对动力电机不同,可分为有刷电调和无刷电调。它根据控制信号调节电动机的转速。对于它们在多旋翼无人机中的连接,一般情况如下:
(1)电调的输入线与电池连接;
(2)电调的输出线(有刷两根、无刷三根)与电机连接;
(3)电调的信号线与遥控器接收机连接。
另外,电调一般有电源输出功能(BEC),即在信号线的正负极之间有5V左右的电压输出,通过信号线为接收机及舵机供电。一般电调都具有以下几个功能:
1、整流,将电源的直流电变为交流电
2、稳压,在信号线的正负极之间有5V左右的稳定电压输出
3、调速,通过改变电流来改变电机的转速
4、检测,检测电机是否完好以及是否有遥控器信号
5、换向,改变电机转向

4. 动力电源:为多旋翼无人机提供能量,直接关系到无人机的悬停时长、最大负载重量和飞行距离等重要指标。通常采用化学电池来作为电动无人机的动力电源,主要包括:镍氢电池,镍铬电池,锂聚合物,锂离子动力电池。其中前两种电池因重量重,能量密度低,现已基本被锂聚合物动力电池所取代。锂聚合物的电池的标称电压是3.7V,满电电压是4.2V,储存电压是3.8V,放电后的保护电压为3.6V。电池的放电能力是以倍率(C)来表示的,它的意思是说按照电池的标称容量最大可达到多大的放电电流。例如,一个1000mAh、10C 的电池,最大放电电流可达1000×10=10000毫安,即10安培(A)。一般这种电池都是由好几块电芯串联到一起的,例如,3S锂电池,就是由三块电芯串联到一起得到的。一般这种电池的放电倍率可以做到很大,而充电倍率一般不超过5C。

2)飞控系统

1. 主控单元:飞行控制系统的核心,通过它将IMU、GPS指南针、舵机和遥控接收机等设备接入飞行控制系统从而实现飞行器自主飞行功能。除了辅助飞行控制以外,某些主控器还具备记录飞行数据的黑匣子功能。
2. IMU(惯性测量单元):
(友情提示:太长不看,请往下拉)
现在的飞控内部使用的都是由三轴陀螺仪,三轴加速度计,三轴地磁传感器和气压计组成的一个IMU,也称惯性测量单元。那么什么是三轴陀螺仪,什么是三轴加速度计,什么是三轴地磁传感器呢,气压计?它们在飞机上起到的是什么作用呢,这三轴又是哪三个轴呢?三轴陀螺仪,三轴加速度计,三轴地磁传感器中的三轴指的就是飞机左右,前后垂直方向上下这三个轴,一般都用XYZ来代表。左右方向在飞机中叫做横滚,前后方向在飞机中叫做俯仰,垂直方向就是Z轴。陀螺都知道,小时候基本上都玩过,在不转动的情况下它很难站在地上,只有转动起来了,它才会站立在地上,或者说自行车,轮子越大越重的车子就越稳定,转弯的时候明显能够感觉到一股阻力,这就是陀螺效应,根据陀螺效应,聪明的人们发明出的陀螺仪。最早的陀螺仪是一个高速旋转的陀螺,通过三个灵活的轴将这个陀螺固定在一个框架中,无论外部框架怎么转动,中间高速旋转的陀螺始终保持一个姿态。通过三个轴上的传感器就能够计算出外部框架旋转的度数等数据。
由于成本高,机械结构的复杂,现在都被电子陀螺仪代替,电子陀螺仪的优势就是成本低,体积小重量轻,只有几克重,稳定性还有精度都比机械陀螺高。说到这,大家也就明白陀螺仪在飞控中起到的作用了吧,它就是测量XYZ三个轴的倾角的。那么三轴加速度计时干什么的呢,刚刚说道三轴陀螺仪就是XYZ三个轴,现在不用说也就明白三轴加速度计也是XYZ三个轴。当我们开车起步的一瞬间就会感到背后有一股推力,这股推力呢就是加速度,加速度是速度变化量与发生这一变化时间的比值,是描述物体变化快慢的物理量,米每二次方秒,例如一辆车在停止状态下,它的加速度是0,起步后,从每秒0米到每秒10米,用时10秒,这就是这辆车的加速度,如果车速每秒10米的速度行驶,它的加速度就是0,同样,用10秒的时间减速,从每秒10米减速到每秒5米,那么它的加速就是负数。三轴加速度计就是测量飞机XYZ三个轴的加速度。
我们日常出行都是根据路标或记忆来寻找自己的面向的,地磁传感器就是感知地磁的,就是一个电子指南针,它可以让飞机知道自己的飞行朝向,机头朝向,找到任务位置和家的位置。气压计呢就是测量当前位置的大气压,都知道高度越高,气压越低,这就是人到高原之后为什么会有高原反应了,气压计是通过测量不同位置的气压,计算压差获得到当前的高度,这就是整个IMU惯性测量单元,它在飞机中起到的作用就是感知飞机姿态的变化,例如飞机当前是前倾还是左右倾斜,机头朝向、高度等最基本的姿态数据。
3. GPS指南针模块:包含GPS模块和指南针模块,用于精确确定飞行器的方向及经纬度。
4. LED指示灯模块:用于实时显示飞行状态,是飞行过程中必不可少的,它能帮助飞手实时了解飞行状态。
3)视频系统
1. 摄像机:拍摄无人机飞行路径上的画面。
2. 云台:常用的有二轴云台和三轴云台。云台作为相机或摄像机的増稳设备,提供两个方向或三个方向的增稳控制。
3. 图传:将无人机在空中拍摄的画面实时稳定地发射给地面图传遥控接收显示端上,供操控者观看。无人机图传系统,就是采用适当的视频压缩技术、信号处理技术、信道编码技术及调制解调技术,将现场无人机所搭载的摄像机拍摄到的视频以无线方式实时传送到远距离后方的一种无线电子传输设备。

如果按设备的类型来分类,通常可分为模拟图传和数字图传两大类。早期的图传设备都采用的是模拟制式,它的特点是只要图传发射端和接收端工作在一个频段上,就可以收到画面。由于数字图传所传输的视频质量和稳定性都要远远好于模拟图传系统,所以在工业级应用中通常都采用数字图传。
4)遥控系统
控制无人机的方法很多,最传统的就是遥控器了,此外地面站用的数传电台。另外还有不是特别主流的蓝牙、wifi、3G/4G等。
无人机遥控器一般成对出售,一个发射机,一个接收机。他们需要配对使用,不同厂家的发射机和接收机有可能没法通用,在购买时需要确认他们之间的协议是否一致。
发射机上装有摇杆,旋钮,开关等器件,飞手通过调整发射机上的这些器件来远程控制无人机。飞手给出的控制命令由接收机接收,接收机与飞控相连将信号转递给飞控。
遥控器还有一个美国手、日本手之说。美国手与日本手是指无人机的操控方式,美国手是左手油门,日本手是右手油门,对应不同的操控器油门方向杆的不同布局。
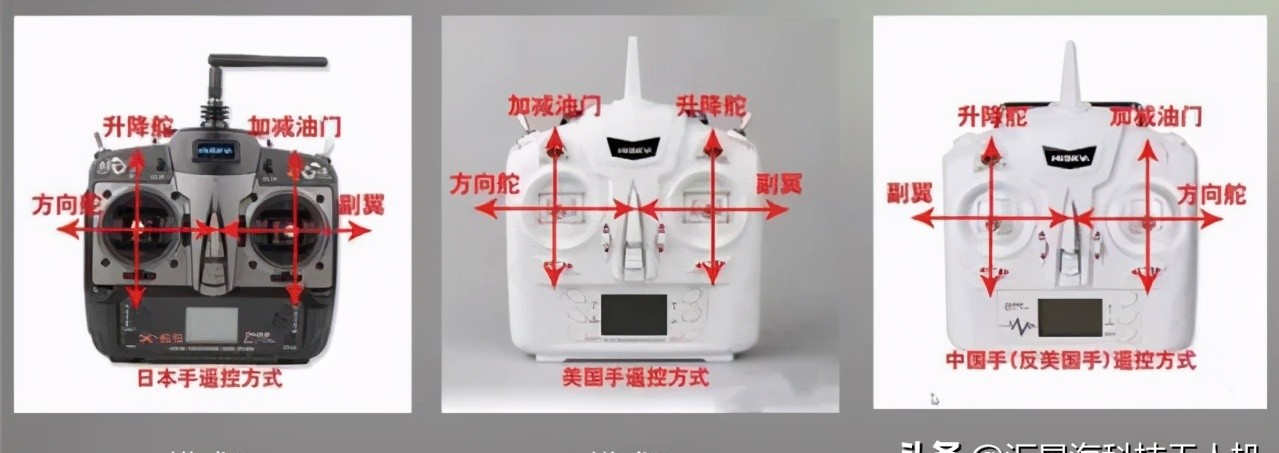
美国手:又称左手油门。就是遥控器的左摇杆,负责无人机的上升下降、原地顺时针/逆时针旋转;遥控器的右摇杆,负责无人机在水平位置上的前后左右移动。
日本手:又称右手油门。与美国手的区别其实并不大,仅在于将控制无人机上升下降与前进后退,进行了对调。也就是左摇杆负责无人机的前进后退、原地顺时针/逆时针旋转;遥控器的右摇杆,负责无人机的上升下降和左右移动。
中国手:也有人称作“反美国手”,因为其与“美国手”完全相反,遥控器的左摇杆,负责无人机在水平位置上的前后左右移动;遥控器的右摇杆,负责无人机的上升下降、原地顺时针/逆时针旋转。
几种操作方式并无好坏、难易之分,只不过不同人习惯不同罢了。如果你不知道如何选择的话,就选美国手吧,用的人多,淘汰以后也更好出手。

 闽ICP备11002594号-6
闽ICP备11002594号-6